Running SimpleOpenNI 1.96 and Processing 3.5.4 within Windows 10 with a Kinect 360 camera
Written July 2021
Dr Jennifer Martay, Anglia Ruskin University
After installing all of the software, I used the “Hello World” of Kinect to check everything was running properly. This code was on p 62 of Making Things See by Greg Borenstein, a book I used extensively while learning – I highly recommend it! Paste the below into Processing, click Run, and fingers crossed, you’ll see something like this pop up on your screen too!
import SimpleOpenNI.*;
SimpleOpenNI kinect;
void setup()
{
size(1280,480);
kinect = new SimpleOpenNI(this);
kinect.enableDepth();
kinect.enableRGB();
}
void draw()
{
kinect.update();
PImage depthImage=kinect.depthImage();
PImage rgbImage=kinect.rgbImage();
image(depthImage,0,0);
image(rgbImage,640,0);
}
Find more already-typed out examples of cool stuff here: https://github.com/atduskgreg/Making-Things-See-Examples
Note: All the 2D and 3D point cloud stuff in Making Things See worked well for me. I started running into problems when I started “Working with Skeleton Data” (Ch 4). Newer Processing versions and/or SimpleOpenNI libraries must have different codings?
Here are the changes I needed to make the skeleton calibration work (p 191-192):
firstTrackAndCalibrate
import SimpleOpenNI.*;
SimpleOpenNI kinect;
void setup()
{
size(640,480);
kinect= new SimpleOpenNI(this);
kinect.enableDepth();
//turn on tracking
kinect.enableUser(); //in older versions, this took an argument
}
void draw()
{
kinect.update();
PImage depth=kinect.depthImage();
image(depth,0,0);
//make vector of ints to store users
IntVector userList = new IntVector();
//write list of users
kinect.getUsers(userList);
if (userList.size()>0)
{
int userId = userList.get(0);
if (kinect.isTrackingSkeleton(userId))
{
//make vector for left hand
PVector rightHand = new PVector();
//put position of left hand into vector
float confidence = kinect.getJointPositionSkeleton(userId, SimpleOpenNI.SKEL_LEFT_HAND, rightHand);
//convert detected hand to match depth image
PVector convertedRightHand = new PVector();
kinect.convertRealWorldToProjective(rightHand, convertedRightHand);
//and display it
if(confidence>0.5)
{
fill(255,0,0);
float ellipseSize = map(convertedRightHand.z,700,2500,50,1);
ellipse(convertedRightHand.x, convertedRightHand.y, ellipseSize,ellipseSize);
}
}
}
}
//user tracking callbacks //in older versions all of the callbacks below were different
void onNewUser(SimpleOpenNI curContext,int userId)
{
println("onNewUser - userId: " + userId);
println("\tstart tracking skeleton");
kinect.startTrackingSkeleton(userId);
}
void onLostUser(SimpleOpenNI curContext,int userId)
{
println("onLostUser - userId: " + userId);
}
void onVisibleUser(SimpleOpenNI curContext,int userId)
{
println("onVisibleUser - userId: " + userId);
}
The code on p 247-248 also did not work for me. In this example, different users and features within the Kinect’s view are shown in different colours. The command “kinect.enableScene” is used but appears not to work with Processing 3.5.4. Other people suggested using “kinect.enableUser” instead. This change let the user access the pixels representing people but not other background objects. This isn’t something I was desperate to do anyway so I did not look extensively for updated commands!
Chapter 5 is about 3D scanning. The two programs that are used in this chapter are ModelBuilder v4 and MeshLab 2021.07 which downloaded without any problems. I had to add 2 lines above setup() to get the SimpleDateFormat to work though:
import java.text.SimpleDateFormat; import java.util.Date;
Other Articles:
Quantum MechanicsA no-nonsense description of quantum mechanics with no maths or philosophy. The concepts are explained with animations, which are mainly computer simulations of electrons. |
|
|
Physics Algorithms BookThis is a work in progress to write a book on physics algorithms. At the moment, it is about 1/3 finished though, but the latest version can be downloaded for free. |
|
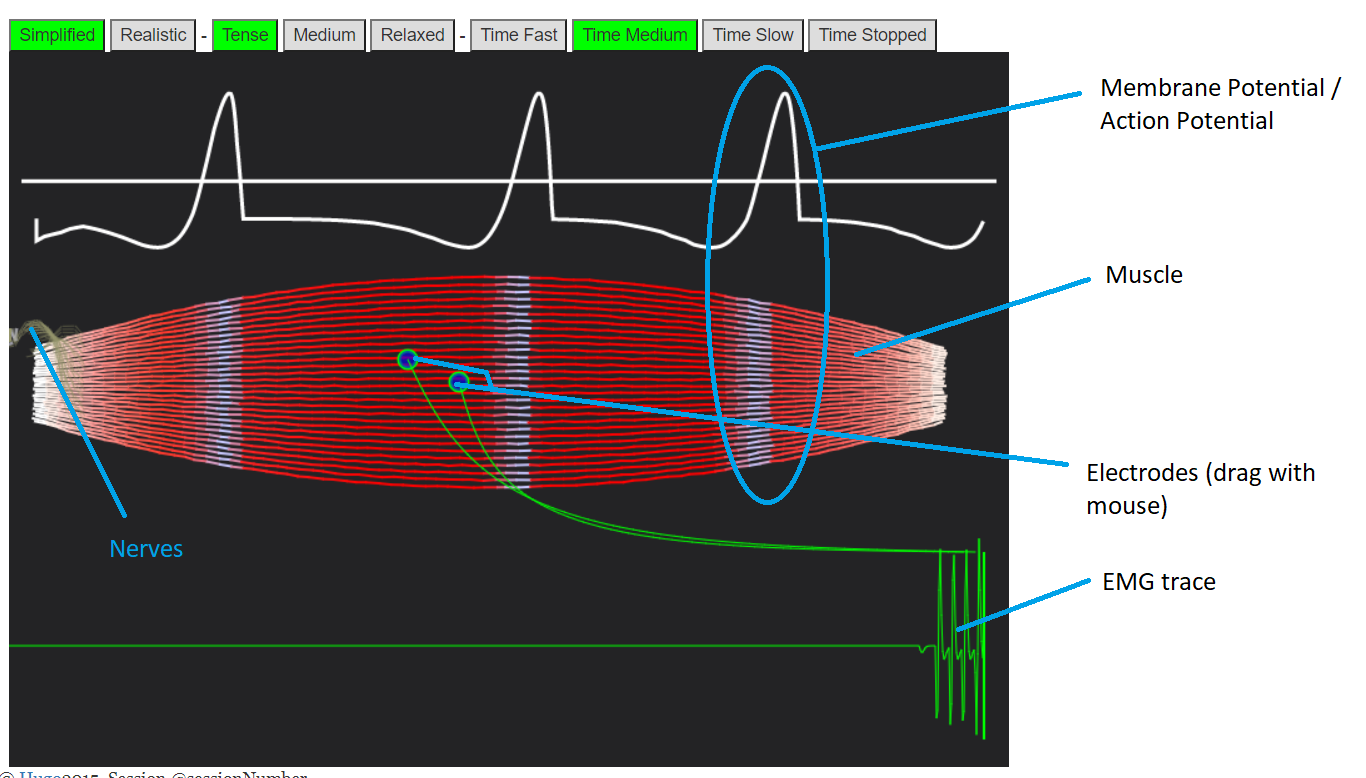
BodyWorks: Neuromuscular Activity / Muscle EMGAn interactive simulation showing how nerves travel to and down muscles, and how this gets picked up by EMG sensors. |